Waymo分析
Waymo as Project
Waymo began as the Google self-driving car project in 2009. Today, we’re an independent self-driving technology company with a mission to make it safe and easy for everyone to get around—without the need for anyone in the driver’s seat.
- make our roads safer
- free up people’s time
- improve mobility for everyone
Waymo as Company
2016,Waymo,a self-driving technology company The Google self-driving car project became Waymo, a self-driving technology company with a mission to make it easy and safe for people and things to move around.
- easy: 不用学车了,同时开车不用耗费精力了。
- safe: 每年大量人为驾驶问题,且有许多障碍人士和越来越老龄化。
- people and things: 并不仅仅局限在人。
Safe
The world around us
- 1.25 million deaths worldwide due to vehicle crashes in 2014
- 32,675 deaths in the United States due to vehicle crashes in 2014
- 6% increase in traffic fatalities in 2016, reaching the highest point in nearly a decade
- There’s a clear theme to the vast majority of these incidents: human error and inattention. 94% of crashes involve human choice or error in the US.
- U.S. fatalities associated with human choice or error (2014)
- 9,262 Speeding
- 9,967 Alcohol
- 3,179 Distraction
- 846 Drowsiness
How Our Self-Driving Vehicle Sees the World and How it Works?
At the most basic level, human drivers need to answer four questions: “Where am I?” (perceiving the environment around you), “What’s around me?” (processing that information), “What will happen next?” (predicting how others in that environment will behave), and “What should I do?” (making driving decisions based on that information). Self-driving vehicles need to answer those questions, too.
-
Where Am I?
Before our cars drive in any location, our team builds our own detailed three-dimensional maps that highlight information such as road profiles, curbs and sidewalks, lane markers, crosswalks, traffic lights, stop signs, and other road features. Rather than rely on GPS, Waymo’s vehicles cross-reference their pre-built maps with realtime sensor data to precisely determine their location on the road.
-
What’s Around Me?
Our sensors and software scan constantly for objects around the vehicle—pedestrians, cyclists, vehicles, road work, obstructions—and continuously read traffic controls, from traffic light color and railroad crossing gates to temporary stop signs. Our vehicles can see up to 300 meters away (nearly three football fields) in every direction.
-
What Will Happen Next?
For every dynamic object on the road, our software predicts future movements based on current speed and trajectory. It understands that a vehicle will move differently than a cyclist or pedestrian. The software then uses that information to predict the many possible paths that other road users may take. Our software also takes into account how changing road conditions (such as a blocked lane up ahead) may impact the behavior of others around it.
-
What Should I Do?
The software considers all of this information as it finds an appropriate route for the vehicle to take. Our software selects the exact trajectory, speed, lane, and steering maneuvers needed to progress along this route safely. Because our vehicles are constantly monitoring the environment, and predicting the future behavior of other road users in 360 degrees around our vehicles, they’re able to respond quickly and safely to any changes on the road.
Our System Safety Program (Safety By Design)
Safety by Design means we consider safety from the ground up and incorporate safety at every system level and every development stage, from design to testing and validation. It is a multi-pronged approach that builds upon best practices from a variety of industries, including aerospace, automotive, and defense (including aspects of MIL-STD-882E [10] and ISO 26262). [11]
Areas Addressed by Waymo’s System Safety Program:
-
Behavioral Safety:
Behavioral safety refers to the driving decisions and behavior of our vehicles on the road.Just as for human drivers, our vehicles are subject to traffic rules and must safely navigate a variety of scenarios, both expected and unexpected. Waymo uses a combination of functional analysis, simulation tools, and on-road driving to fully understand the challenges presented within our operational design domain, and to develop safety requirements and a multi-pronged testing and validation process.
-
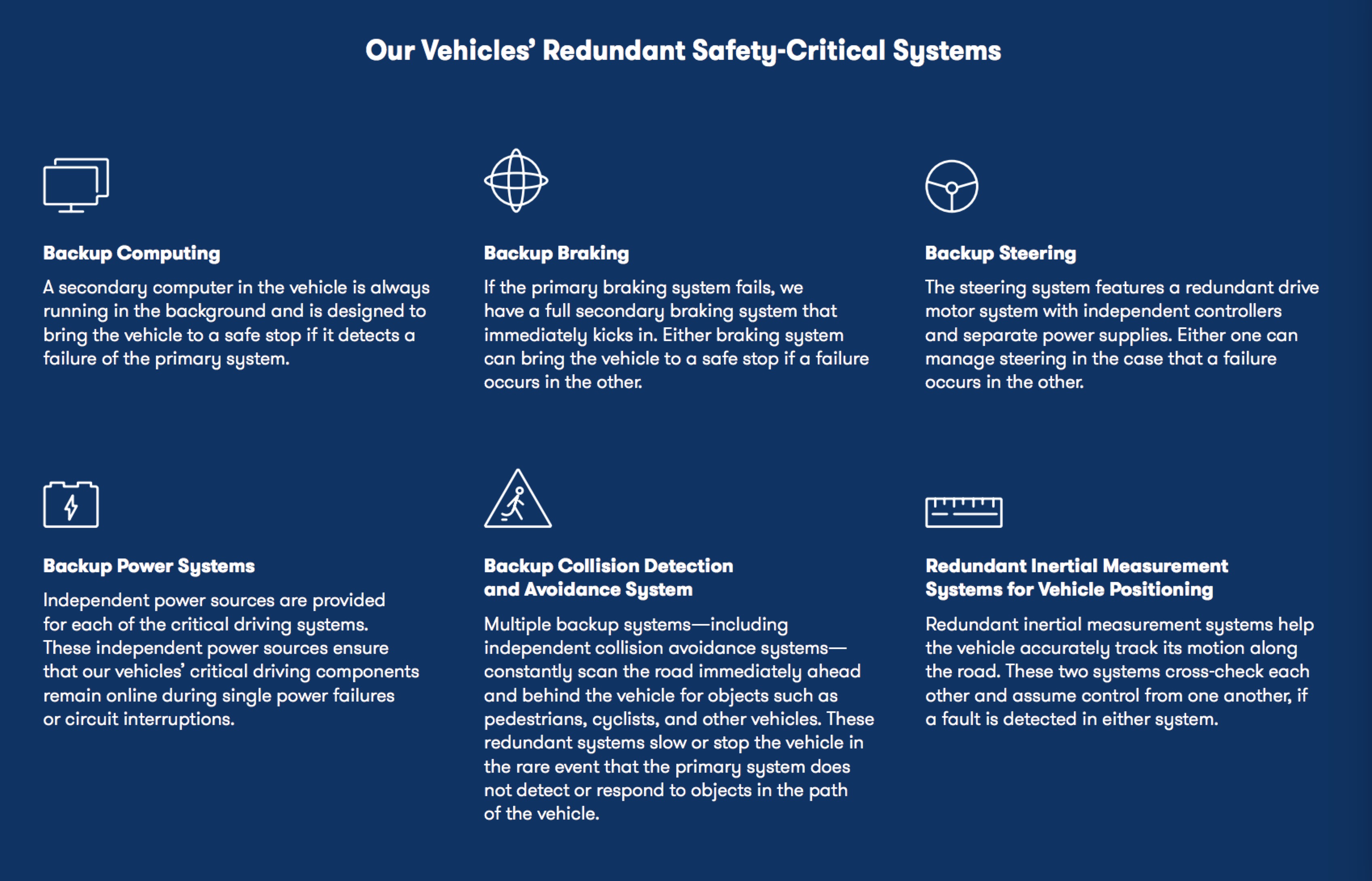
Functional Safety:
Functional safety seeks to ensure that our vehicles operate safely even when there is a system fault or failure. That means building in backup systems and redundancies to handle the unexpected.For example, all of our self-driving vehicles are equipped with a secondary computer that can take over in the event of a main computer failure, bringing the vehicle to a safe stop (i.e. a minimal risk condition). Each of our vehicles also has backup steering and braking, along with many layers of redundancies throughout the system.
-
Crash Safety:
Crash safety, or crashworthiness, refers to the ability of vehicles to protect passengers inside the vehicles through a variety of measures, ranging from a structural design that shields people inside, to features like seat restraints and airbags that mitigate injury or prevent death. Crash safety in the U.S. is covered by the Federal Motor Vehicle Safety Standards (FMVSS), which are issued by the National Highway Traffic Safety Administration (NHTSA). Vehicle manufacturers must certify that their base vehicles meet applicable FMVSS requirements.
-
Operational Safety:
This refers to the interaction between our vehicles and passengers. With operational safety, we can ensure that consumers have a safe and comfortable experience in our vehicles. Our approach to building a safe product is informed by our hazard analyses, existing safety standards, extensive testing, and best practices from a variety of industries. For example, through initiatives like our early rider program (further described in section 4), we have developed and tested user interfaces so that passengers can clearly indicate their destination, direct the vehicle to pull over, and contact Waymo rider support.
-
Non-Collision Safety:
We address physical safety for the range of people who might interact with the vehicle. For example, this includes electrical system or sensor hazards that could cause harm to occupants, vehicle technicians, test drivers, first responders, or bystanders.
Safety Porcesses
-
Waymo organizes the processes we use to keep our vehicles safe through our System Safety Program.
-
The hazard analysis process helps identify requirements for our self-driving system architecture, subsystems, and components. These safety requirements are developed from the use of a series of subsystem and system analysis techniques, various systems engineering processes, and Federal and State laws and regulations. The analysis also supports the development of requirements for our behavioral safety testing, and how our system detects and handles faults.
How Waymo’s Self-Driving Vehicles Work?
This type of technology falls under SAE International’s definition of a Level 4 automated driving system, as our technology also has the ability to bring a vehicle to a safe stop (i.e. a minimal risk condition) in the event of any system failures. Unlike autonomous systems at lower levels (Level, 1, Level 2, and Level 3), a Level 4 system also has the ability to bring a vehicle to a safe stop (i.e. achieve a minimal risk condition) in the event of any system failures, without any expectation that a human driver take over. [13]
In 2012 we developed and tested a Level 3 system that would drive autonomously on the freeway in a single lane but would still require a driver to take over at a moment’s notice. During our internal testing, however, we found that human drivers over-trusted the technology and were not monitoring the roadway carefully enough to be able to safely take control when needed.
-
Object and Event Detection and Response: Our Vehicle Sensors
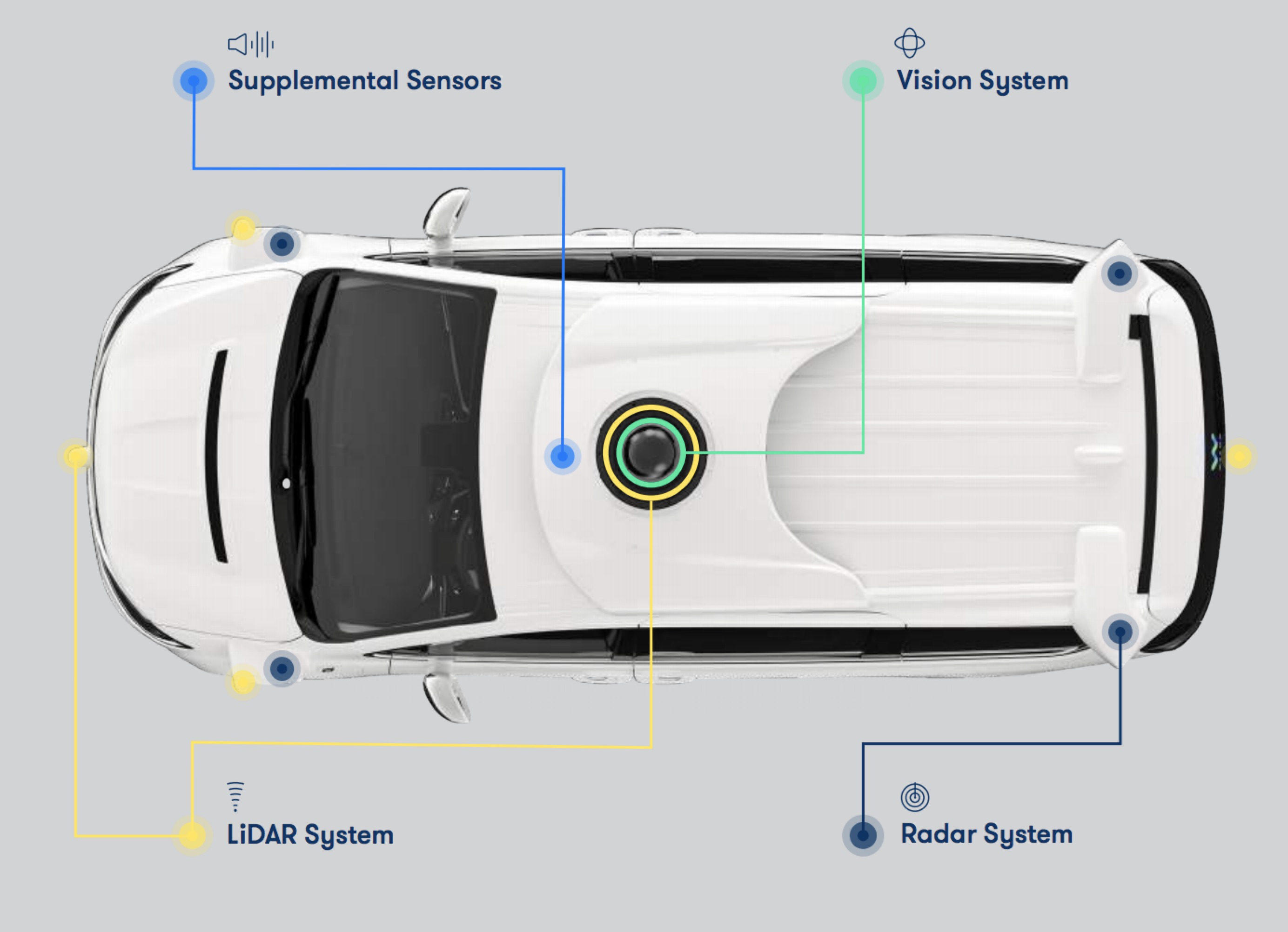
- LiDAR (Laser) System
LiDAR (Light Detection and Ranging) works day and night by beaming out millions of laser pulses per second—in 360 degrees— and measuring how long it takes to reflect off a surface and return to the vehicle. Waymo’s system includes three types of LiDAR developed in-house: a short-range LiDAR that gives our vehicle an uninterrupted view directly around it, a high-resolution mid-range LiDAR, and a powerful new generation long-range LiDAR.
- Vision (Camera) System
Our vision system includes cameras designed to see the world in context, as a human would, but with a simultaneous 360-degree field of view, rather than the 120-degree view of human drivers. Because our high-resolution vision system detects color, it can help our system spot traffic lights, construction zones, school buses, and the flashing lights of emergency vehicles. Waymo’s vision system is comprised of several sets of high-resolution cameras, designed to work well at long range, in daylight and low-light conditions.
- Radar System
Radar uses wavelengths to perceive objects and movement. These wavelengths are able to travel around objects like rain drops, making radar effective in rain, fog, and snow, day or night. Waymo’s radar system has a continuous 360-degree view, so it can track the speed of road users in front, behind and to both sides of the vehicle.
- Supplemental Sensors
Waymo vehicles also have a number of additional sensors, including our audio detection system that can hear police and emergency vehicle sirens up to hundreds of feet away, and GPS to supplement our vehicles’ extensive understanding of their physical locations in the world.
-
Our Self-Driving Software While our software is made up of many different pieces, here we detail three main components: perception, behavior prediction, and planner.
- PERCEPTION:
Perception is the part of our software that detects and classifies objects on the road, while also estimating their speed, heading, and acceleration over time. Our self-driving software takes the myriad of details coming from Waymo’s sensors and turns them into a cohesive real-time view of the world. Perception helps our vehicle distinguish pedestrians, cyclists, motorcyclists, vehicles, and more. It also distinguishes the color of static objects such as traffic signals. For these kinds of objects, perception enables our system to semantically understand the situation around our vehicle—whether a light is green and clear for the vehicle to proceed, or whether a lane is blocked because of the many cones in front of it.
- behavior prediction
With behavior prediction, our software can model, predict, and understand the intent of each object on the road. Because Waymo has millions of miles of driving experience, our vehicles have highly accurate models of how different road users are likely to behave. For example, our software understands that, though pedestrians, cyclists, and motorcyclists may look similar, their behavior can vary dramatically. Pedestrians move more slowly than either cyclists or motorcyclists, but they can change direction more suddenly.
- PLANNER
Our planner considers all the information our software has gathered from perception and behavior prediction, and plots out a path for our vehicles. In our experience, the best drivers are the defensive drivers. That’s why we’ve baked in defensive driving behaviors, such as staying out of other drivers’ blind spots and leaving extra room for cyclists and pedestrians. Waymo’s planner can also think several steps ahead. For example, if our software perceives that an adjacent lane ahead is closed due to construction, and predicts that a cyclist in that lane will move over, our planner can make the decision to slow down or make room for the cyclist well ahead of time. Using our on-road experience, we’re also refining our driving so our movements on the road are smooth and comfortable for passengers inside our vehicles, and natural and predictable for other road users.
-
Operational Design Domain: Ensuring Our Vehicles Operate Safely Under Specific Conditions
Waymo’s domain includes geographies, roadway types, speed range, weather, time of day, and state and local traffic laws and regulations.
Waymo’s system is also designed so each vehicle does not operate outside of its approved operational design domain. For example, passengers cannot select a destination outside of our approved geography, and our software will not create a route that travels outside of a “geo-fenced” area, which has been mapped in detail (see “How We Build a Map for a Self-Driving Vehicle”). Similarly, our vehicles are designed to automatically detect sudden changes (such as a snowstorm) that would affect safe driving within their operational design domain and come to a safe stop (i.e. achieve a “minimal risk condition”) until conditions improve.
Our ultimate goal is to develop fully selfdriving technology that can take someone from A to B, anytime, anywhere, and in all conditions. As our system’s capabilities grow and are validated, we will expand our operational design domain to bring our technology to more people.
-
Minimal Risk Condition (Fallback): Ensuring the Vehicle Can Transition to a Safe Stop
If our self-driving vehicle can no longer proceed on a planned trip, it must be capable of performing a safe stop, known as a “minimal risk condition” or fallback.This might include situations when the selfdriving system experiences a problem, when the vehicle is involved in a collision, or when environmental conditions change in a way that would affect safe driving within our operational design domain.
-
Data Recording and Post-Crash Behavior
Waymo’s system can detect when it has been involved in a collision and will notify our Waymo operations center automatically. There our trained specialists can initiate post-crash procedures, which include procedures for interacting with law enforcement and first responders, and for sending members of our team on location.
-
Self-Driving Vehicle Cybersecurity
Waymo has developed a robust process to identify, prioritize, and mitigate cybersecurity threats. Our security practices are built on the foundation of Google’s Security processes and are informed by publications like the NHTSA Cybersecurity Guidance and the Automotive Information Sharing and Analysis Center’s (Auto-ISAC) Automotive Cybersecurity Best Practices. To help develop future security best practices, Waymo has also joined the Auto-ISAC, an industry-operated initiative created to enhance cybersecurity awareness and collaboration across the global automotive industry.
Waymo’s Approach to Security
- Build Verifiable Software and Systems
- Encrypt and Verify Channels of Communication
- Build Redundant Security Measures for Critical Systems
- Limit Communication Between Critical Systems
- Provide Timely Software Updates
- Model and Prioritize Threats
Testing and Validation Methods
Waymo’s self-driving vehicles consist of three primary subsystems that are individually and rigorously tested:
- The base vehicle, as certified by the OEM
- Our in-house hardware, including sensors and computers
- Our self-driving software that makes all the driving decisions
Base Vehicle Safety
Self-Driving Hardware Testing
Self-Driving Software Testing
- Simulation Testing
How Simulation Works?
- Step 1: Start with a Highly-Detailed Vision of the World
- Step 2: Drive, Drive, and Redrive
- Step 3: Create Thousands of Variations
- Closed-Course Testing
- Real-World Driving
Behavioral Competencies for Normal Driving
A fully self-driving vehicle must be able to handle all the everyday driving tasks expected of human drivers within the same operational design domain. This means self-driving systems need to demonstrate they have the adequate skills—or “behavioral competencies”—required for the intended locations and conditions of operation.
Waymo’s safety program has expanded the 28 core competencies in both breadth and depth, for which we test thousands of scenario variations—ranging in complexity—ensuring that our system can safely handle the challenges of real-world environments. In addition, we have identified further categories that expand upon the initial 28 core competencies. [17] (For a subset of Waymo’s behavioral competencies, see Appendix A.)
Testing Crash Avoidance Capabilities
In 2015, NHTSA published data showing the distribution of the most common pre-crash scenarios. For example, just four crash categories accounted for 84% of all crashes: rear end crashes, vehicles turning or crossing at an intersection, vehicles running off the edge of the road, and vehicles changing lanes.
Hardware Reliability and Durability Testing
Waymo engineers design unique stress tests. Using our knowledge of the physics of failure to accelerate environmental stresses on our vehicle and its individual components, we compress years of real-world use into days and weeks of testing.
Interacting Safely with the Public
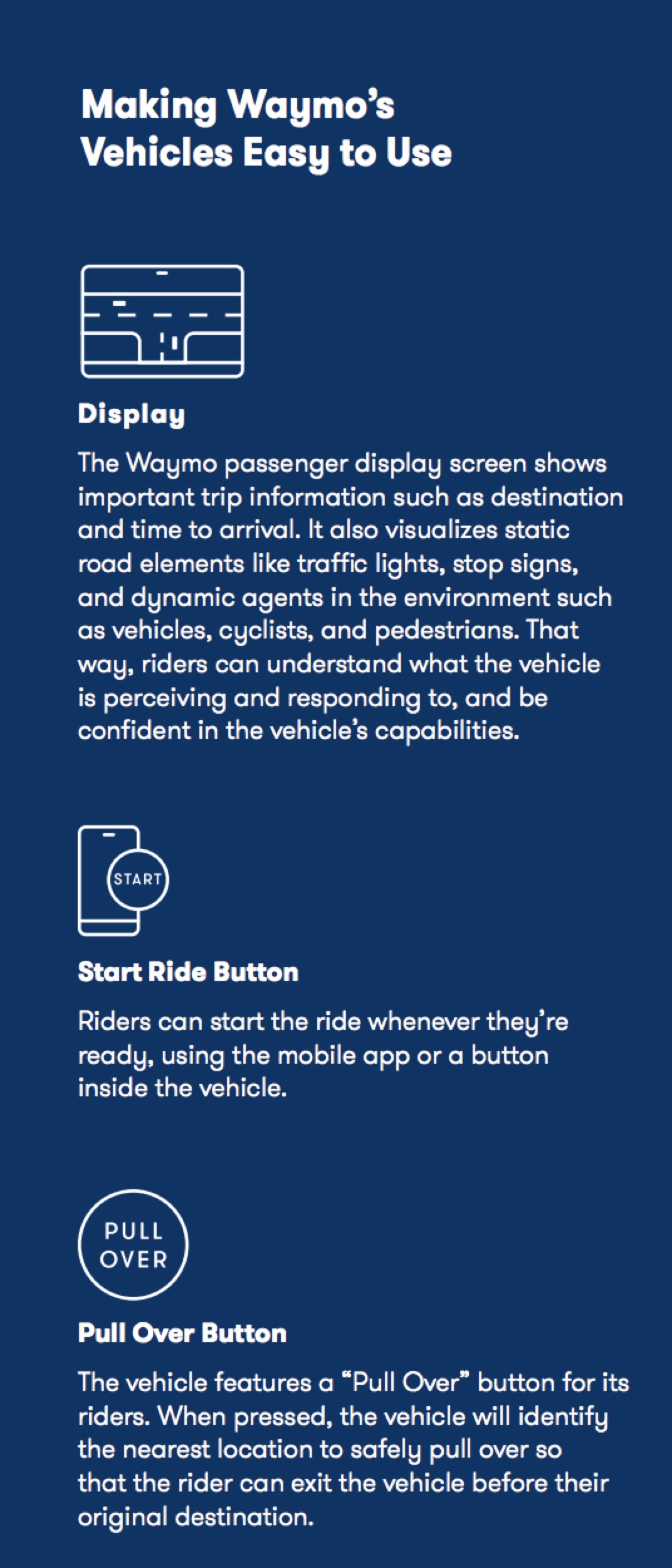
Our vehicles are designed to drive themselves, so our user interface focuses on passengers, not drivers.
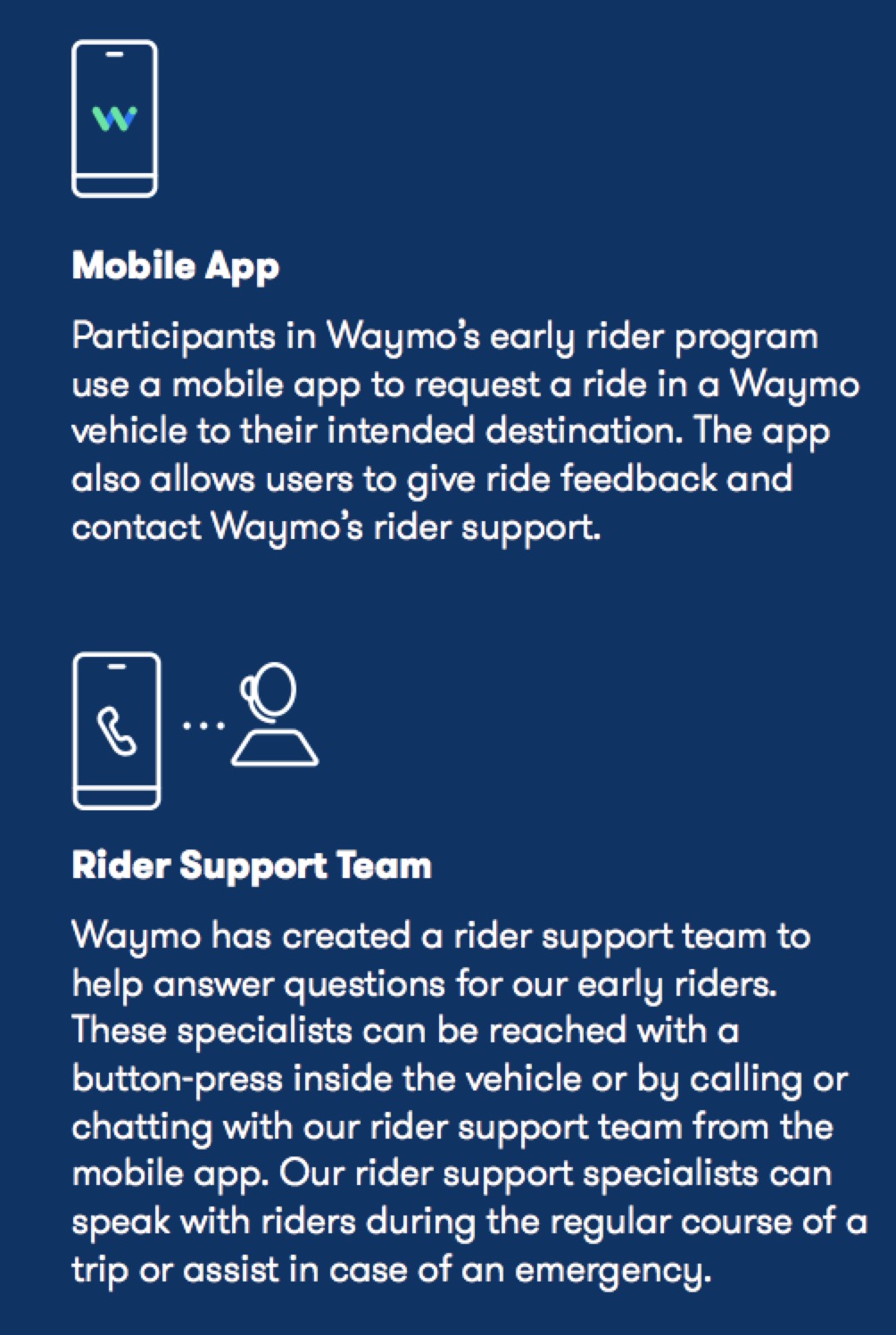
That’s why we’ve developed specific in-car features and user interfaces that help our passengers understand what our vehicles are doing on the road and let them do things like set a destination, ask the vehicle to pull over, and get in touch with Waymo support staff as needed. We also understand the transportation challenges that exist today, especially around accessibility, and we are working to develop solutions that work for riders of all abilities.
In addition to creating a safe and intuitive everyday ride for our passengers, Waymo has also developed procedures in case of emergency. For example, not only are our vehicles designed to detect collisions and respond appropriately to emergency vehicles on the road, but we have also conducted trainings with law enforcement and first responders who may come into contact with our vehicles.
Rider Experience
Waymo’s user experience is guided by four main principles: give passengers the information they need for a seamless trip; help passengers anticipate what’s next; proactively communicate the vehicle’s response to events on the road; and help passengers engage safely with the vehicle.
Accessibility: Unlocking Opportunities for Those Who Cannot Drive Today
Emergencies and Interacting With Law Enforcement and First Responders
Waymo的官网介绍很聪明,分成三部分,公司成长;waymo的技术;waymo在路上;
Self-Driving Technology Can Save Lives and Improe Mobility
资料来源: