http://apollo.auto/devcenter/coursevideo_cn.html?target=1_9
第一课 无人驾驶概览
1. 欢迎学习apollo课程
2. 你将学到什么?
3. 什么是无人驾驶?
4. Sebastian 欢迎辞
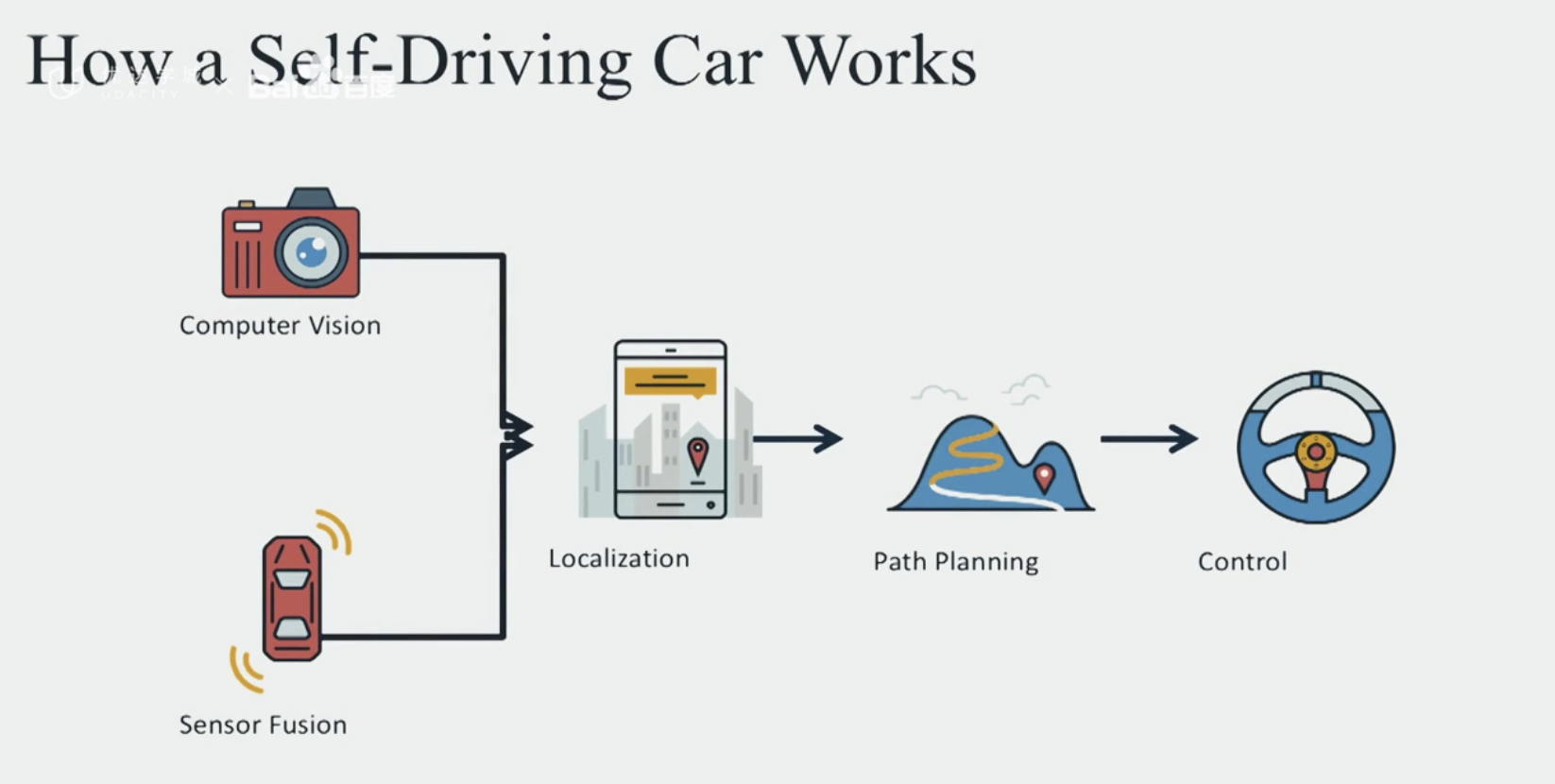
5. 无人驾驶车的运作方式
6. Apollo 团队与架构
7. 参考车辆与硬件平台
8. 开源软件架构
9. 云服务
10. 无人驾驶车纳米
11. 开启专题学习之旅
第二课 高精度地图
1. 地图简介
2. Sebastian 介绍高精度地图
3. 高精度地图 vs. 传统地图
4. 地图与定位、感知与规划的关系_a
5. 地图与定位、感知与规划的关系_b
6. 地图与定位、感知与规划的关系_c
7. Apollo 高精度地图
8. Apollo 高精度地图构建
9. 课程综述
第三课 定位
1. 定位简介
2. Sebastian 介绍定位
3. GNSS RTK_a
4. GNSS RTK_b
5. 惯性导航_a
6. 惯性导航_b
7. 激光雷达定位
8. 视觉定位
9. Apollo 定位
10. 项目示例:被盯上的小车
11. 课程综述
第四课 感知
1. 感知简介
2. Sebastian 介绍感知
3. 计算机视觉
4. 摄像头图像
5. LiDAR 图像
6. 机器学习
7. 神经网络
8. 反向传播算法
9. 卷积神经网络
10. 检测与分类
11. 跟踪
12. 分割
13. Apollo 感知
14. 传感器数据比较
15. 感知融合策略
16. 项目示例:感知与融合
17. 课程综述
第五课 预测
1. 预测简介_a
2. 预测简介_b
3. Sebastian 介绍预测
4. 不同的预测方式
5. 基于车道的预测
6. 障碍物状态
7. 预测目标车道
8. 递归神经网络
9. 递归神经网络在目标车道预测的应用
10. 轨迹生成
11. 课程综述
第六课 规划
1. 规划简介
2. Sebastian 介绍规划
3. 路由
4. 世界到图
5. 网格世界_a
6. 网格世界_b
7. 网格世界_c
8. A*
9. 从路由到轨迹
10. 3D 轨迹
11. 评估一条轨迹_a
12. 评估一条轨迹_b
13. Frenet 坐标
14. 路径-速度解耦规划
15. 路径生成与选择
16. ST 图
17. 速度规划
18. 优化
19. 路径-速度规划的轨迹生成
20. Lattice 规划
21. ST轨迹的终止状态
22. SL轨迹的终止状态
23. Lattice规划的轨迹生成
24. 项目示例:路径规划
25. 课程综述
第七课 控制
1. 控制简介
2. Sebastian 介绍控制
3. 控制流程_a
4. 控制流程_b
5. PID控制_a
6. PID控制_b
7. PID控制_c
8. PID 优劣对比
9. 线性二次调节器
10. 模型预测控制
11. 时间范围与车辆模型
12. MPC优化
13. MPC优劣对比
14. 项目示例:控制
15. 课程综述
第八课 结束旅程
1. 恭喜你完成课程学习
2. Sebastian 祝贺辞