Badue, Claudine, et al. “Self-driving cars: A survey.” arXiv preprint arXiv:1901.04407 (2019).
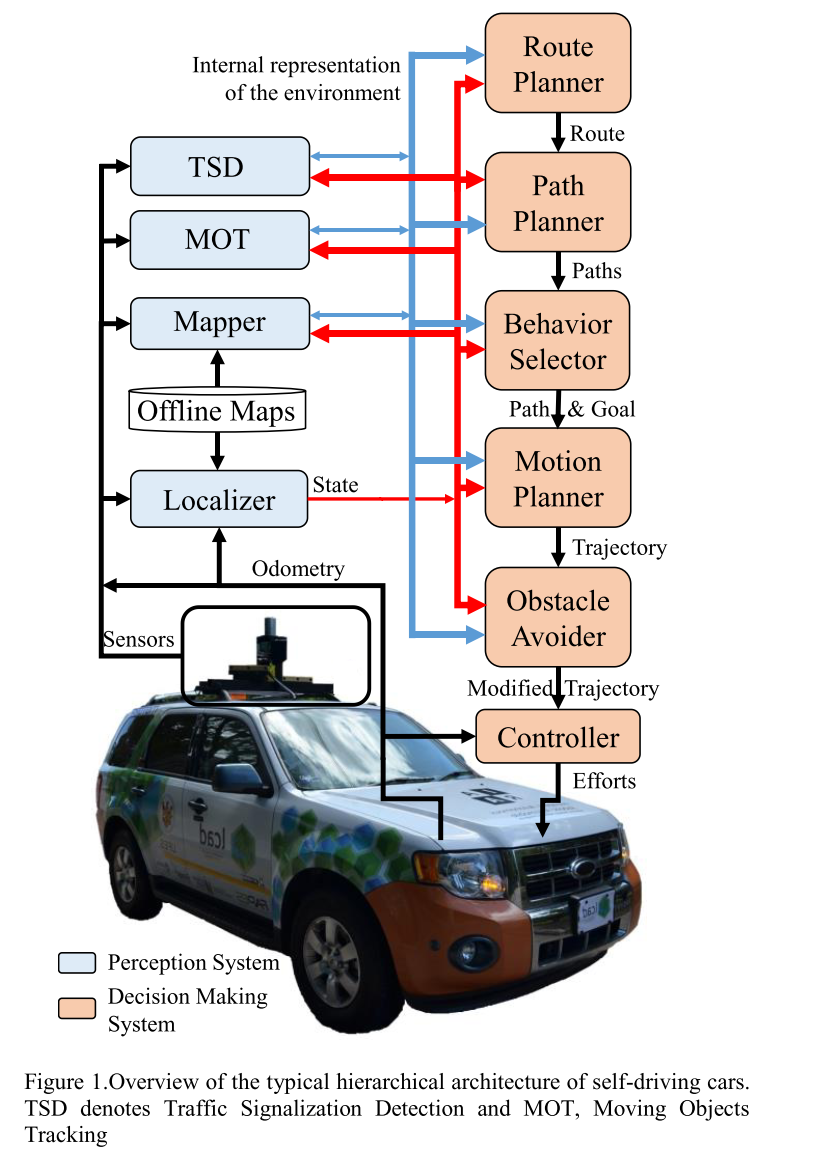
The architecture of the autonomy system of self-driving cars is typically organized into the perception system and the decision-making system.
The perception system is generally divided into many subsystems responsible for tasks such as self-driving-car localization, static obstacles mapping, moving obstacles detection and tracking, road mapping, traffic signalization detection and recognition, among others.
The decision- making system is commonly partitioned as well into many subsystems responsible for tasks such as route planning, path planning, behavior selection, motion planning, and control.
I. Introduction
II. Overview of the Architecture of Self-Driving Cars
III. Perception
A. Localization
1) LIDAR-Based Localization
2) LIDAR plus Camera-Based Localization
3) Camera-Based Localization
B. Offline Obstacle Mapping
1) Discrete Space Metric Representations
2) Continuous Space Metric Representations
C. Road Mapping
1) Road Map Representation
2) Road Map Creation
D. Moving Objects Tracking
1) Traditional Based MOT
2) Model Based MOT
3) Stereo Vision Based MOT
4) Grid Map Based MOT
5) Sensor Fusion Based MOT
6) Deep Learning Based MOT
E. Traffic Signalization Detection and Recognition
1) Traffic Light Detection and Recognitioin
2) Traffic Sign Deterction and Recognition
3) Pavement Marking Detection and Recognition
IV. Decision Making
A. Route Planning
1) Goal-Directed Techniques
2) Separator-Based Techniques
3) Hierarchical Techniques
4) Bounded-Hop Techniques
5) Combinations
B. Motion Planning
1) Path Planning
2) Trajectory Planning
C. Control
1) Path Tracking Methods
2) Hardware Actuation Control Methods
V. Architecture of the UFES’s Car “IARA”
VI. Self-Driving Cars under Development in the Industry